[해외 DS] 이제는 로봇까지 설계하는 인공지능, “자연 선택과 비슷해”
가장 효율적인 이동 형태를 발견한 AI 경사 하강법으로 변이의 좋고 나쁨을 판단 인간의 로봇 설계와 다른 디자인, 낯설지만 유익해
[해외DS]는 해외 유수의 데이터 사이언스 전문지들에서 전하는 업계 전문가들의 의견을 담았습니다. 저희 데이터 사이언스 경영 연구소 (GIAI R&D Korea)에서 영어 원문 공개 조건으로 콘텐츠 제휴가 진행 중입니다.
자연은 최초의 걷는 생명체를 진화시키는 데 수십억 년이 걸렸지만, 새로운 알고리즘은 진화 과정을 압축하여 단 30초 만에 성공적으로 걷는 로봇을 설계했다. 직선을 따라 움직이는 단순한 기계지만 인공지능으로 로봇 설계가 가능하다는 사실은 고무적이다.
자연과 같이 최적의 형태를 선택해
흥미롭게도 이 로봇은 지렁이처럼 꿈틀거리거나 미끄러지듯 움직이는 방식이 아니라 항상 다리를 만들어 움직이는 동작을 수행하는 것처럼 보였다. 인공지능은 놀랍게도 자연과 같은 보행 설루션인 ‘다리’를 스스로 생각해 낸 것이다. 연구진은 로봇에 다리가 있어야 한다고 AI에 지시하지 않았고 실제로도 다리를 이용한 이동은 지상에서 가장 효율적인 이동 형태이다.
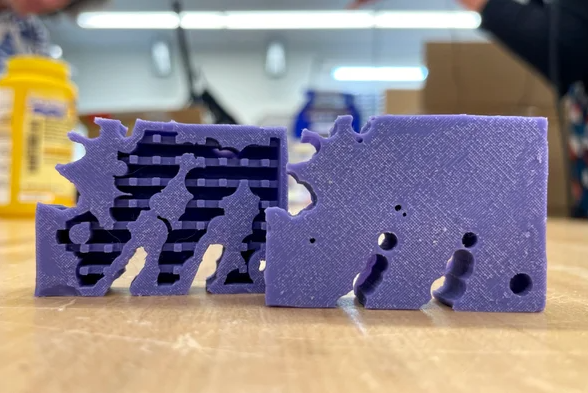
다리의 진화는 쉽게 이해가 되지만, 신기하게도 AI는 로봇의 몸 전체에 무작위로 보이는 곳에 구멍을 뚫었다. 연구진은 다공성이 무게를 줄이고 유연성을 더해 로봇이 다리를 구부려 걸을 수 있게 해준다는 가설을 세웠다. 구멍을 제거하면 로봇은 더 이상 걸을 수 없거나 잘 걷지 못하기 때문에 다공성 디자인은 알고리즘에 의해 의도된 진화라고 해석할 수 있다.
효율적인 진화 시뮬레이션을 위해 사용된 경사 하강법
이제 인공지능은 에세이를 쓰고 자동차를 운전할 수 있으므로 설계 분야에서의 적용은 당연한 순서처럼 느껴진다. 이번 연구는 진화 시뮬레이션을 사용하여 특정 작업(이 경우 전방 이동)을 수행할 수 있는 로봇을 생성했다. 이전에는 진화 로봇을 만들려면 무작위 변형을 생성하여 테스트하고, 새로운 변형을 통해 가장 성능이 좋은 로봇을 다듬은 후 다시 테스트하는 과정을 거쳤었다. 이 작업에는 많은 컴퓨팅 자원이 필요했다.
노스웨스턴대 연구진은 기존의 방식 대신 경사 하강이라는 방법을 선택했는데, 이는 유도 진화에 가까웠다. 무작위로 생성된 몸체로 시작하지만, 주어진 보디 디자인이 임무를 얼마나 잘 수행할 수 있는지를 판단 하는 알고리즘이 내재하여 있다는 점에서 무작위 진화와는 다르다. 최적화 과정에서 AI는 성공으로 이어질 가능성이 가장 높은 경로에 집중하여 돌연변이가 좋은지 나쁜지 확인할 수 있기 때문이다.
연구원들은 로봇을 임의의 모양으로 시작하여 AI에 지상 이동을 개발하는 목표를 부여한 다음, 초기 로봇을 가상 환경에 풀어놓고 진화하도록 설정했다. 그 결과 10번의 시뮬레이션과 단 몇 초 만에 최적의 상태에 도달했다. 아울러 연구진은 10월 3일 미국국립과학원회보(Proceedings of the National Academy of Sciences USA)에 로봇이 움직이지 않는 보디 설계에서 초당 최대 0.5 보폭으로 움직일 수 있었으며, 이는 인간 평균 보행 속도의 약 절반에 해당한다고 보고했다. 몇 번의 반복만으로 AI가 임의의 형태에서 기능적인 무언가를 만들 수 있다는 점이 인상적이다.
AI 로봇 설계가 열어준 가능성
시뮬레이션이 실제로 작동하는지 확인하기 위해 연구진은 3D 프린팅으로 가장 성능이 좋은 로봇의 몸체 틀을 만들고 실리콘으로 속을 채웠다. 연구진은 근육의 수축과 팽창을 시뮬레이션하기 위해 모형의 빈 곳에 공기를 주입했다. 그 결과 비누 한 개 정도의 크기로 제작된 로봇은 마치 작은 만화 캐릭터처럼 움직이기 시작했다. AI 시뮬레이션 로봇이 실제 세계에서 반드시 성공하리라는 보장이 없기 때문에 이 광경을 목격한 이들은 흥분을 감추지 못했다.
듀크 대학교의 명예교수이자 로스앤젤레스 캘리포니아 대학교의 캐서린 헤일스(N. Katherine Hayles) 교수는 비록 로봇이 매우 단순하고 한 가지 작업만 수행할 수 있지만, 더 진보된 로봇 설계를 향한 한 걸음이라고 바라봤다. ‘우리는 어떻게 포스트 휴먼이 되었나’의 저자인 그녀는 경사 하강법은 이미 인공 신경망을 설계하는 데 널리 사용되고 있기 때문에 뇌와 신체를 결합하는 데 용이하고 그 파급 효과가 강력할 것이라고 강조했다. 두뇌와 신체의 공진화를 통해 살아 있는 유기체를 닮은 로봇이 탄생하는 특이점이 올 것이라는 기대였다.
인간은 로봇을 디자인할 때 익숙한 사물처럼 보이도록 디자인하는 경향이 있다. 하지만 AI는 인간이 생각지도 못했던 새로운 가능성과 새로운 길을 만들어 낼 수 있기 때문에 인류가 직면한 가장 어려운 문제를 해결하는 데 도움이 될 수 있다. 기후 변화를 개선하는 데 도움이 될 차세대 배터리 설계부터 현재 치료가 불가능한 질병에 대한 새로운 항생제 및 치료제 개발에 이르기까지, 새로운 제품을 설계할 수 있는 AI가 인간을 다양한 문제에서 벗어나게 할 수 있다.
AI Designs Little Robots in 30 Seconds and They Keep Sprouting Legs
An AI used to build artificial neural networks can also create autonomous robot bodies with remarkable speed
Artificial intelligence can design an autonomous robot in 30 seconds flat on a laptop or smartphone.
It’s not quite time to panic about just anybody being able to create the Terminator while waiting at the bus stop: as reported in a recent study, the robots are simple machines that scoot along in straight lines without doing more complex tasks. (Intriguingly, however, they always seem to develop legs rather than an arrangement that involves wiggling, moving like an inch worm or slithering.) But with more work, the method could democratize robot design, says study author Sam Kriegman, a computer scientist and engineer at Northwestern University.
“When only large companies, governments and large academic institutions have enough computational power [to design with artificial intelligence], it really limits the diversity of the questions being asked,” Kriegman says. “Increasing the accessibility of these tools is something that’s really exciting.”
AI can now write essays and drive cars, so design might seem like a logical next step. But it’s not easy to create an algorithm that can effectively engineer a real-world product, says Hod Lipson, a roboticist at Columbia University, who was not involved in the research. “Many questions remain,” Lipson says of the new study, “but I think it’s a huge step forward.”
The method uses a version of simulated evolution to create robots that can do a specific task—in this case, forward locomotion. Previously, creating evolved robots involved generating random variations, testing them, refining the best performers with new variations and testing those versions again. That requires a lot of computing power, Kriegman says.
He and his colleagues instead turned to a method called gradient descent, which is more like directed evolution. The process starts with a randomly generated body design for the robot, but it differs from random evolution by giving the algorithm the ability to gauge how well a given body plan will perform, compared with the ideal. For each iteration, the AI can home in on the pathways most likely to lead to success. “We provided the [algorithm] a way to see if a mutation would be good or bad,” Kriegman says.
In their computer simulations, the researchers started their robots as random shapes, gave the AI the target of developing terrestrial locomotion and then set the nascent bots loose in a virtual environment to evolve. It took just 10 simulations and a matter of seconds to reach an optimal state. From the original, nonmoving body plan, the robots were able to start moving at up to 0.5 body length per second, about half of the average human walking speed, the researchers reported on October 3 in the Proceedings of the National Academy of Sciences USA. The robots also consistently evolved legs and started walking, the team found. It was impressive that with just a few iterations, the AI could build something functional from a random form, Lipson says.
To see if the simulations worked in practice, the researchers built examples of their best-performing robot by 3-D printing a mold of the design and filling it with silicone. They pumped air into small voids in the shape to simulate muscles contracting and expanding. The resulting robots, each about the size of a bar of soap, crept along like blocky little cartoon characters.
An AI designed this little walking robot.
An AI designed this little walking robot. Credit: Northwestern University
“We’re really excited about it just moving in the right direction and moving at all,” Kriegman says, because AI-simulated robots don’t necessarily translate into the real world.
The research represents a step toward more advanced robot design, even though the robots are quite simple and can complete only one task, says N. Katherine Hayles, a professor emerita at Duke University and a research professor at the University of California, Los Angeles. She is also author of How We Became Posthuman: Virtual Bodies in Cybernetics, Literature, and Informatics (University of Chicago Press, 1999). The gradient descent method is already well-established in designing artificial neural networks, or neural nets—approaches to AI inspired by the human brain—so it would be powerful to put brains and bodies together, she says.
“The real breakthrough here, in my opinion, is going to be when you take the gradient descent methods to evolve neural nets and connect them up with an evolvable body,” Hayles says. The two can then coevolve, as happens in living organisms.
AI that can design new products could get humans unstuck from a variety of pernicious problems, Lipson says, from designing the next-generation batteries that could help ameliorate climate change to finding new antibiotics and medications for currently uncurable diseases. These simple, chunky robots are a step toward this goal, he says.
“If we can design algorithms that can design things for us, all bets are off,” Lipson says. “We are going to experience an incredible boost.”